This is a commissioned project by Prof Olivier Ottevaere. The goal is to create a hotwire cutter capable to cut foam block precisely to make formworks for concrete casting. This projects falls in the category of Machine that Make, extending it to Machine that Make Something that Make.
The project is sponsored by Makeblock to fully embrace the efficiency that a robotic design kit has to offer. The design and construction phrase spanned only 2 weeks by 2 half-time researchers.

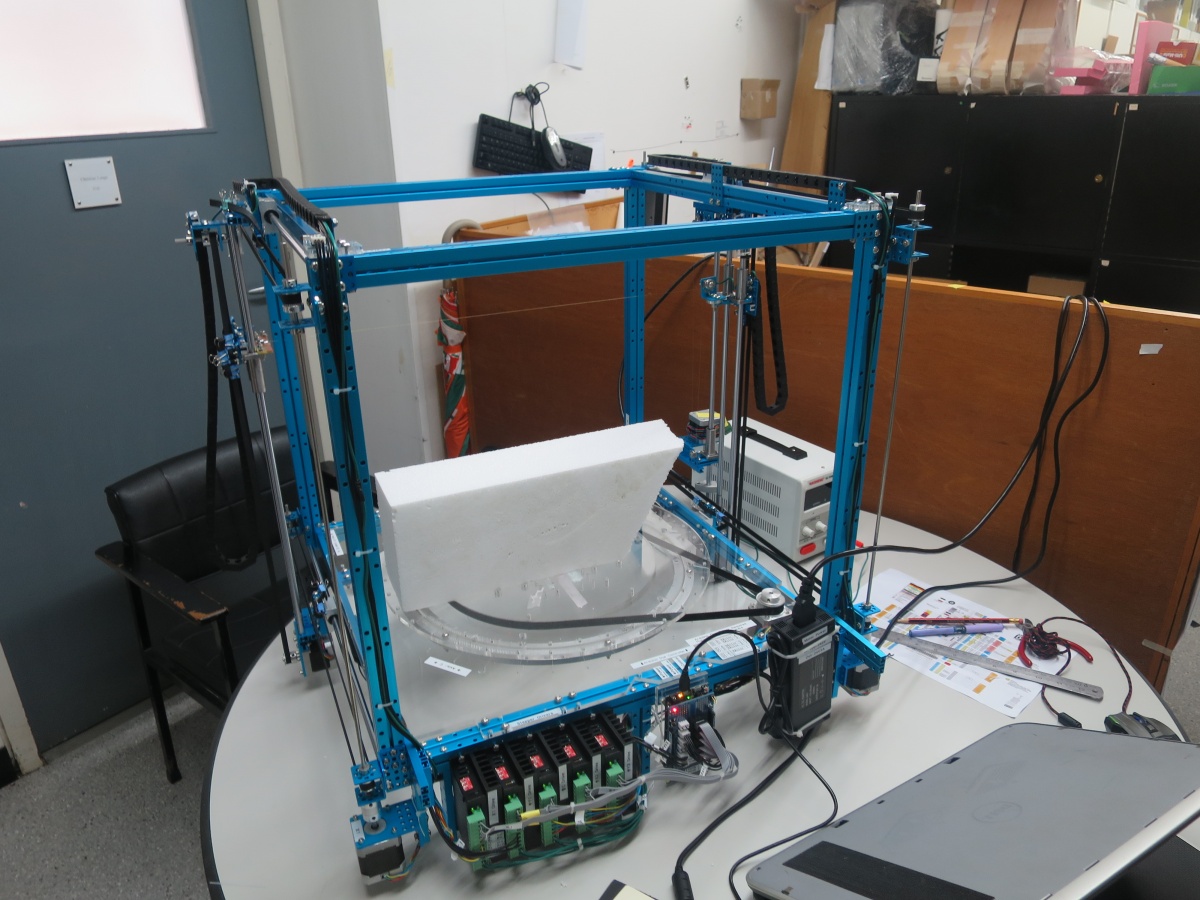
Such hot wire cutter is designed differently from the typical Hot-Wire Frame on Robotic Arm principle. This design does not require high precision robotic arms with multiple degrees of freedom. Instead, it uses only 5 axes separated into 2+2+1 to achieve a similar degree of flexibility.

Foam block can be fixed within the 400mm cube volume; it is fixed directly on a rotary table capable of continuous rotation. Each of the left and right side of the machine consist of an XY stage. A hot wire system spans between the two stages to create the cut. Since the length of wire changes as the two stage moves independently, the hot wire is fixed on one end and tensioned by gravity via a pulley system.
5 Axis Custom-made Hotwire Cutter from Victor Leung on Vimeo.
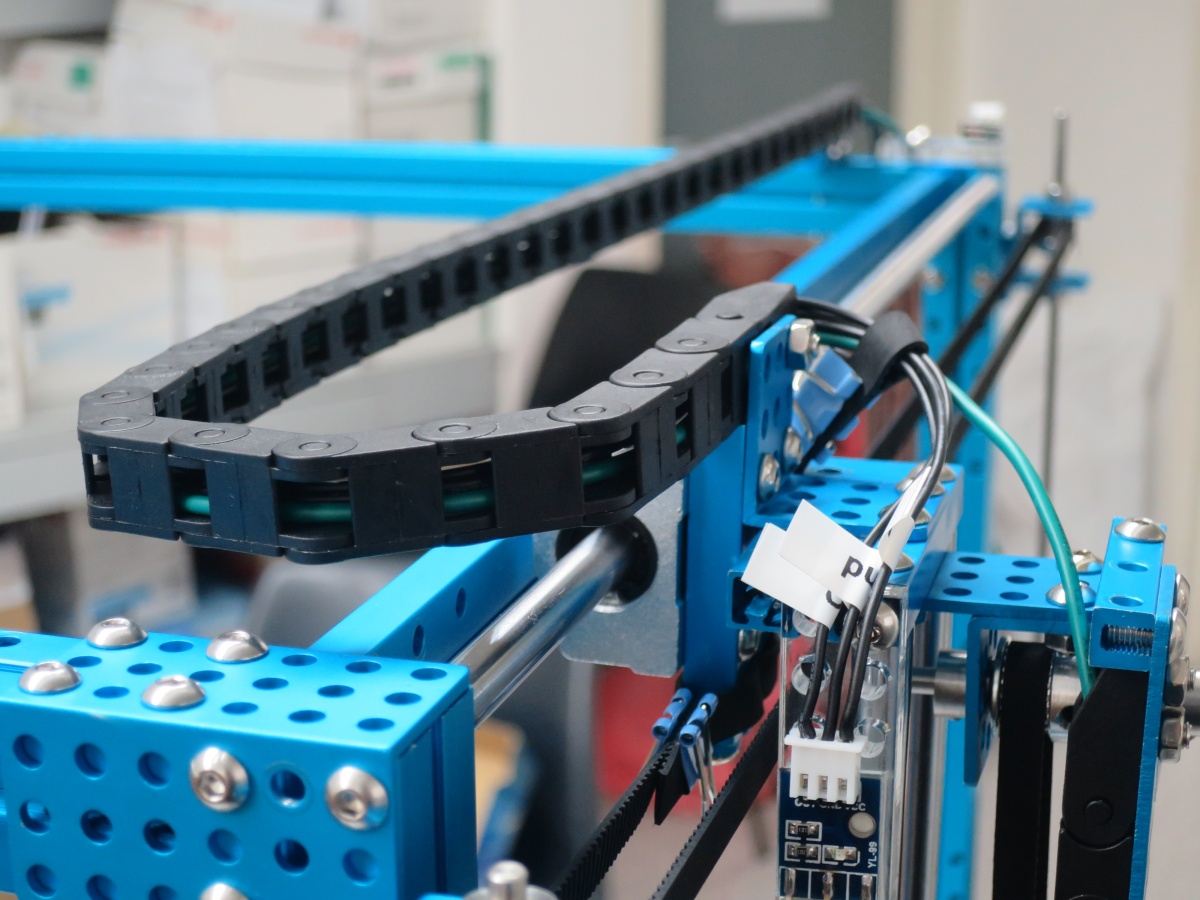
This is the first time I have combined a 3rd party cable track system with Makeblock components to create a machine free from dangling cables. This avoided cables jamming in the operation of the machine. The standardized hole pattern of Makeblock brackets proved to be helpful when I installed the tracks.
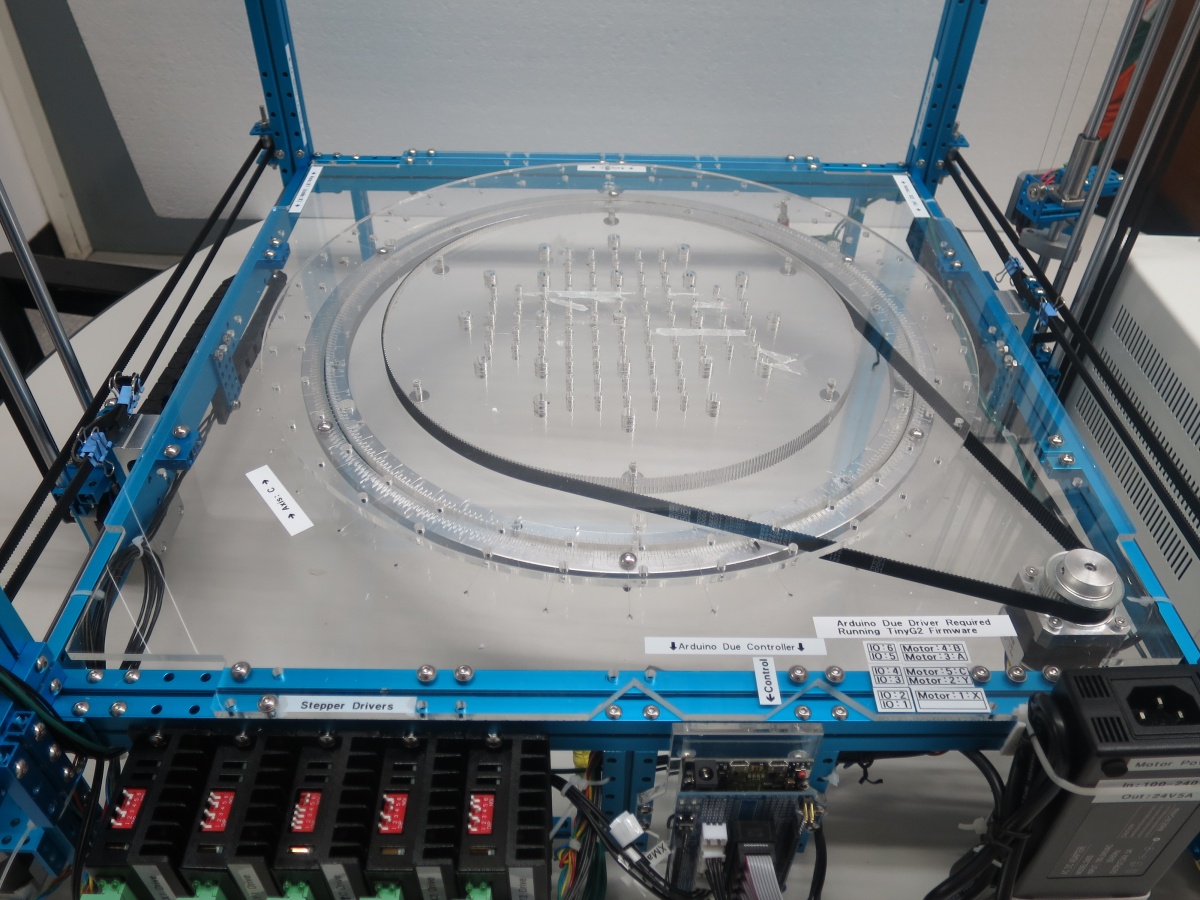
This is also the first time I create a rotary stage out of a lazy sussan. A timing belt is used to link and reduce the speed (10:1) from a stepper motor. It turns out that the required torque on the turntable is higher than my expectation, which I later re-fit a more powerful stepper to the machine.
Vertical axes use 42*40mm 0.4Nm stepper, Horizontal axes use 42*48mm 0.47Nm stepper, the turntable is re-fit to a 42*60mm 0.75Nm stepper. All driven by industrial drivers running TB6600 with 8 microsteps.

This is also the first time I tried TinyG2, a very promising 6 axis G-Code controller that can be run on Arduino Due. I am able to tweak the settings such that I can run 4 linear axis + 1 rotary axis. I am impressed by the ease of use and amount of settings available for the designer. The only downside is that all settings need to be compiled because their developers have not sorted out persistent memory on the Due.

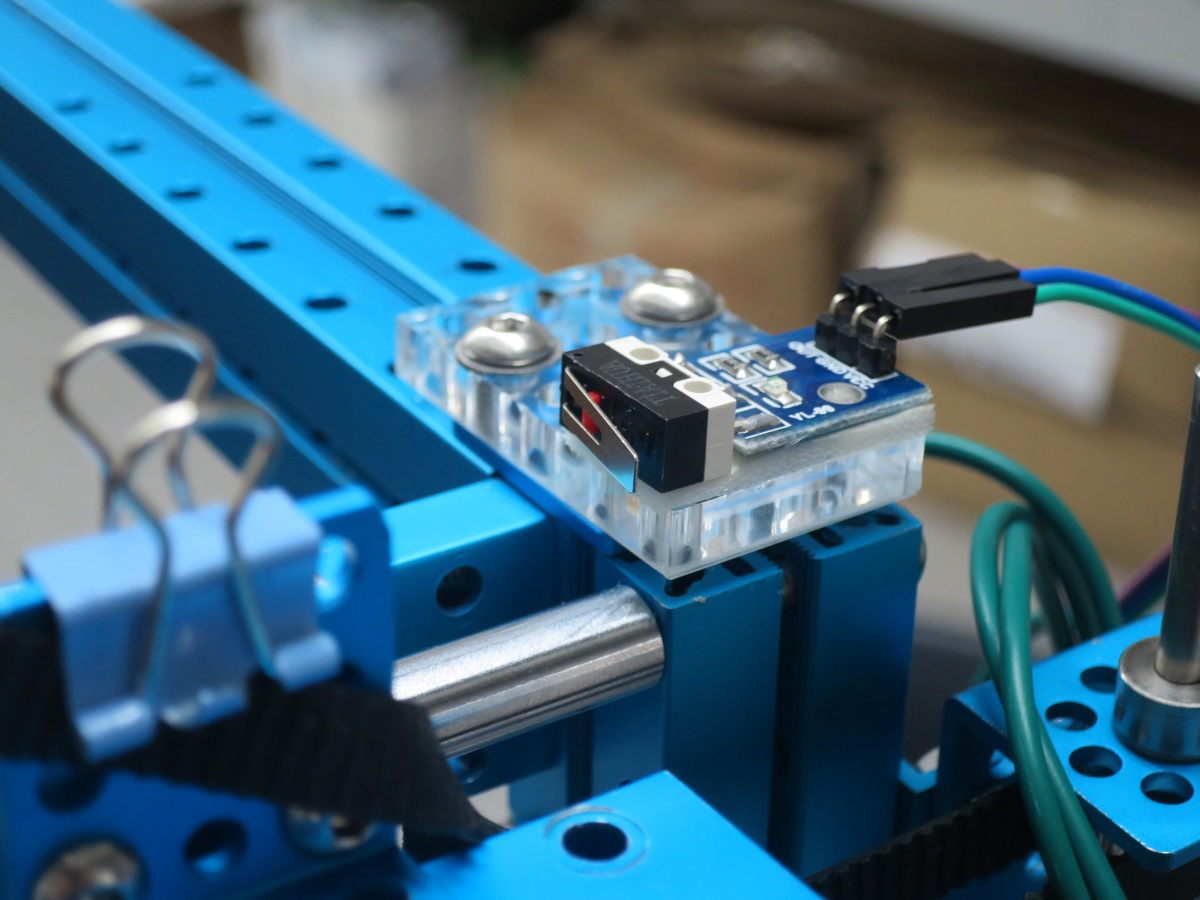
I have used these Normal-Closed End switches purchased from some robotics store that has LED integrated. The LED prove to be helpful when debugging and wiring. I need to adjust TinyG2 settings because it typically requires a Normal-Open switch. I have experenced some electrical interfernce from the motors cable because thhey are run parallel to the end switch cable. My assumption that a Powered-Switch will resolve this problem is not correct.
80/20NiCrom wire of various diameters (0.25 to 1mm) was tried. 0.25mm seems to work best for our machine. The wire have to be tin enough to bend around the V-Slot bearings of 9 mm diameter, it also have to be thick enough to withstand the tensioning force so that it will be stretched straight between the two XY stage. Approximately 1.5N of tensioning force is applied. Much of the NiChrom data is obtained from this website.


